Dieser Text erklärt kompakt und praxisorientiert wie man Zustände und Übergänge von Flipflops berechnet und interpretiert. Der Schwerpunkt liegt auf direkter Anwendbarkeit, nachvollziehbaren Formeln und ausführlichen Wahrheitstabellen. Zielgruppe sind Elektronikpraktiker, Studierende und Funkamateure die schnelle, verlässliche Ergebnisse für Design und Fehlersuche brauchen.
🎓 Flipflops sind elementare Speicherzellen in digitalen Systemen. Sie speichern ein Bit und reagieren auf Eingaben und Taktimpulse. Ein Rechner hilft Zustandsübergänge vorherzusagen, Kaskaden zu analysieren und die Wirkung von asynchronen Eingängen einzuschätzen. Das spart Zeit beim Entwurf und minimiert Fehler bei Inbetriebnahme.
Grundtypen und ihr Verhalten
Die üblichen Typen sind RS, JK, D und T. RS ist am einfachsten, JK erlaubt Toggle Verhalten, D liefert direkt das neue Bit und T toggelt Zustand bei aktiver Eingabe. Jeder Typ hat eine charakteristische Logikfunktion die das nächste Zustandsbit Q n+1 aus Eingängen und aktuellem Zustand Q n berechnet.
| Typ | Eingänge | Kurzcharakteristik |
|---|---|---|
| RS | R, S | Reset und Set Steuerung, Slave Zustand bei beiden Einsen undefiniert |
| JK | J, K, Qn | Set, Reset und Toggle Funktion, rücksetzbarer Zustand kontrolliert |
| D | D | Data Flipflop, Q n+1 = D |
| T | T, Qn | Toggle Flipflop, bei T eins Zustand invertieren |
Formeln in standardisierter Notation
Formeln werden hier getrennt und klar dargestellt. Jede Formel steht in einer eigenen Zeile für bessere Lesbarkeit.
RS Flipflop, nächster Zustand



Qn+1 = S, falls R = 0 und S = 1
Qn+1 = 0, falls R = 1 und S = 0
Qn+1 = Qn, falls R = 0 und S = 0
R = 1 und S = 1 ergibt undefiniert
JK Flipflop, logische Funktion
Qn+1 = J · Q̄n + Qn · K̄
D Flipflop
Qn+1 = D
T Flipflop
Qn+1 = T ⊕ Qn
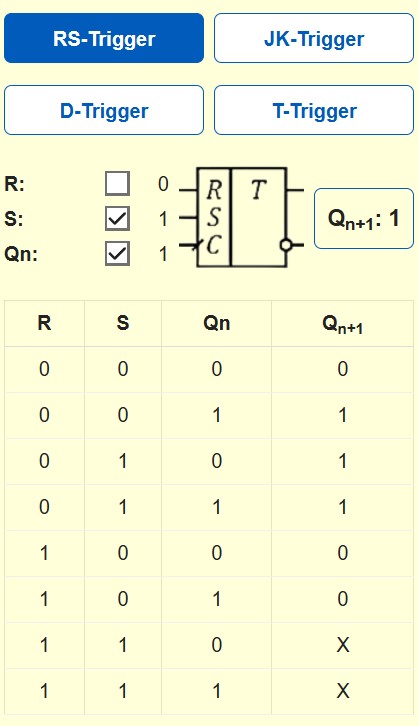
Wahrheitstabellen und Übergangstabellen
Unten stehen detaillierte Tabellen die alle Eingangsvarianten und resultierenden nächsten Zustände auflisten. Tabellen dienen als Referenz beim Testen und Debuggen.
| R | S | Qn | Qn+1 |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 1 |
| 0 | 1 | 1 | 1 |
| 1 | 0 | 0 | 0 |
| 1 | 0 | 1 | 0 |
| 1 | 1 | 0 | X |
| 1 | 1 | 1 | X |
| J | K | Qn | Qn+1 |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 1 |
| 1 | 0 | 1 | 1 |
| 1 | 1 | 0 | 1 |
| 1 | 1 | 1 | 0 |
| D | Qn | Qn+1 |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 1 |
| 1 | 1 | 1 |
| T | Qn | Qn+1 |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
Beispiele mit Schritt für Schritt Rechnung
Beispiel 1, JK Flipflop mit J = 1, K = 0 und Q n = 0
Formel
Qn+1 = J · Q̄n + Qn · K̄
Einsetzen
Q̄n = 1
J · Q̄n = 1 · 1 = 1
Qn · K̄ = 0 · 1 = 0
Qn+1 = 1 + 0 = 1
Ergebnis Q n+1 ist 1
Beispiel 2, T Flipflop mit T = 1 und Q n = 1
Formel
Qn+1 = T ⊕ Qn
Einsetzen
1 ⊕ 1 = 0
Ergebnis Q n+1 ist 0
Timing, Schaltverzögerungen und Setup Zeit
Zeitliche Eigenschaften bestimmen ob Übergänge korrekt erfasst werden. Wichtige Größen sind Propagation Delay, Setup Time und Hold Time. Propagation Delay ist Zeit zwischen Takteingang und stabilem Ausgang. Setup Time ist minimale Zeit die Eingangswerte vor dem Takt stabil sein müssen. Hold Time ist Zeit die Eingangswerte nach der Flanke stabil bleiben müssen. Missachtung führt zu metastabilität und unbestimmtem Verhalten.
✍ Bei Kaskadierung von Flipflops ist Signalpfadlänge zu beachten. Taktverschiebungen, Leitungslatenzen und Asynchroninputs beeinflussen korrekte Übergänge. Verwenden Sie bei kritischen Taktfrequenzen erzwungene Timinganalysen mit Worst Case Werten und messen Sie in der Praxis mit Oszilloskop und Logikanalysator.
Zur Validierung nutzen Sie Logikanalysator oder Oszilloskop. Messen Sie Taktflanken, prüfen Sie Setup und Hold Zeiten, und verifizieren Sie alle Kombinationszustände aus den Wahrheitstabellen. Führen Sie Tests mit definierten Eingangsmustern durch und dokumentieren Sie Q n und Q n+1 für jede Kombination.
Große Referenztabellen
Die folgenden Tabellen dienen als schnelle Referenz. Sie enthalten alle Kombinationen und zeigen Übergangsmuster. Solche Tabellen sind nützlich bei Prüfprotokollen und beim Debuggen von Platinen.
| J | K | Qn | Qn+1 | Aktion |
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | kein Wechsel |
| 0 | 0 | 1 | 1 | kein Wechsel |
| 0 | 1 | 0 | 0 | Reset |
| 0 | 1 | 1 | 0 | Reset |
| 1 | 0 | 0 | 1 | Set |
| 1 | 0 | 1 | 1 | Set |
| 1 | 1 | 0 | 1 | Toggle auf 1 |
| 1 | 1 | 1 | 0 | Toggle auf 0 |
| R | S | Qn | Qn+1 | Bemerkung |
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | halte Zustand |
| 0 | 0 | 1 | 1 | halte Zustand |
| 0 | 1 | – | 1 | Setze |
| 1 | 0 | – | 0 | Reset |
| 1 | 1 | – | X | undefiniert |
Designhinweise und Best Practices
Wählen Sie geeignete Pulstreiber um Flanken scharf zu halten und Störkopplung zu vermeiden. Verwenden Sie Entkopplungskondensatoren nahe der Versorgung jedes ICs. Halten Sie Leitungen kurz und vermeiden Sie Kreuzungen mit schnellen Signalen. Bei hoher Umgebungstemperatur prüfen Sie Parameter auf Drift.
Ein Rechner für Flipflop Zustände ist ein wertvolles Werkzeug. Er liefert schnelle Wahrheitstabellen, klare Formeln und praxisnahe Hinweise. Verwenden Sie die Tabellen als Referenz und überprüfen Sie kritische Pfade mit Messgeräten. Kleine Änderungen an Widerständen oder an Taktparametern können große Auswirkungen haben, deshalb messen, validieren und dokumentieren.
Empfohlene Literatur
- Ulrich Tietz, Elektronik Praxis kompakt, Bauteile und Schaltungen
- Jürgen Becker, Digitale Logik und Schaltungstechnik, Grundlagen und Anwendungen
- Wolfgang Fuchs, Schaltungsdesign für Ingenieure, Zeitbasen und Logik
- Klaus Meier, Digitale Systeme, Entwurf und Simulation
- Peter Lang, Analoge und Digitale Elektronik, Praxisleitfaden
- Hans Richter, Messtechnik in der Elektronik, Oszilloskop und Logikanalysator
- Michael Krauß, Logikfamilien und Flipflops, Ein praktischer Leitfaden

Spezialisiert auf Schaltungsanalyse und HF-Technik mit über 30 Jahren Erfahrung. Andreas prüft die mathematische Präzision aller Elektronik-Tools bei RechnerLab.





